YOLOv3 on Jetson TX2
2020-01-03 update: I just created a TensorRT YOLOv3 demo which should run faster than the original darknet implementation on Jetson TX2/Nano. Check out my last blog post for details: TensorRT ONNX YOLOv3.
Recenetly I looked at darknet web site again and surprising found there was an updated version of YOLO , i.e. YOLOv3. So I spent a little time testing it on Jetson TX2. Here is the result.
A while ago I wrote a post about YOLOv2, “YOLOv2 on Jetson TX2”. And YOLOv3 seems to be an improved version of YOLO in terms of both accuracy and speed. Check out the following paper for details of the improvements.
Here is how I installed and tested YOLOv3 on Jetson TX2.
Prerequisite
I tested YOLOv3 on a Jetson TX2 with JetPack-3.2. In order to test YOLOv3 with video files and live camera feed, I had to first install opencv-3.4.0 on the Jetson TX2. Reference: How to Install OpenCV (3.4.0) on Jetson TX2
Note that YOLOv3 could not be compiled against opencv-3.4.1 due to this problem (/usr/include/opencv2/core/cvdef.h:485:1: error: unknown type name ‘namespace’). So be sure to use opencv-3.4.0 when building YOLOv3.
Step-by-step
-
Clone the latest darknet source code from GitHub.
$ cd ~/project $ git clone https://github.com/pjreddie/darknet yolov3 $ cd yolov3 -
Modify the first few lines of
Makefileas follows. Note that CUDA architecture of TX2 is “62”, while TX1 “53”.GPU=1 CUDNN=1 OPENCV=1 ...... ARCH= -gencode arch=compute_53,code=[sm_53,compute_53] \ -gencode arch=compute_62,code=[sm_62,compute_62] -
Build the code.
$ make -
I first tested YOLOv3 with this YouTube video. I downloaded the video from YouTube and saved it as
traffic.mp4. Then I ran YOLOv3 with pre-trained weights (with the COCO dataset) over the video file. And I got 3~3.3 frames per second, while the object detection results looked OK.### set TX2 to max performance mode $ sudo nvpmodel -m 0 $ sudo ~/jetson_clocks.sh ### download the pre-trained weights and run YOLOv3 $ wget https://pjreddie.com/media/files/yolov3.weights $ ./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights \ traffic.mp4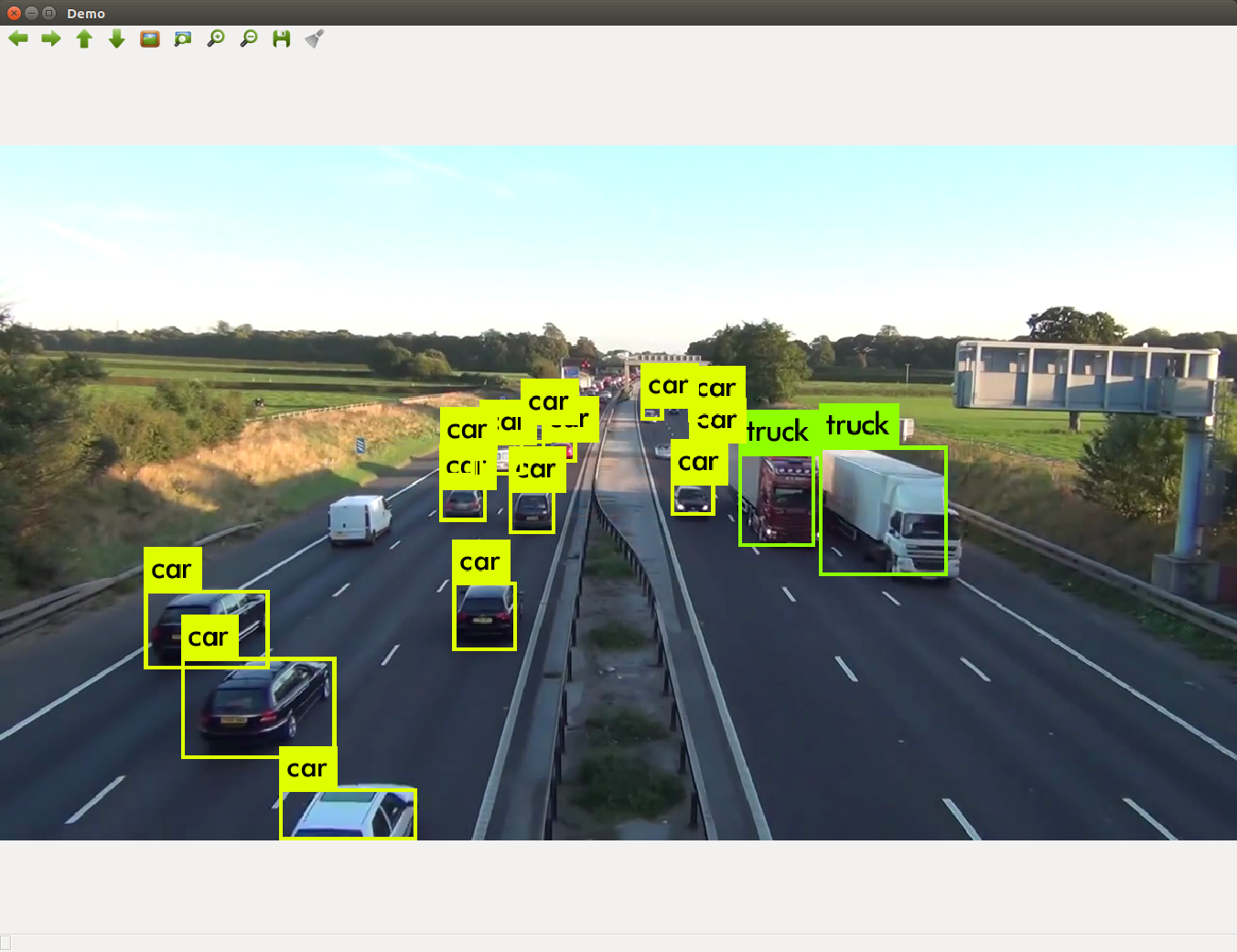
-
I also tested YOLOv3 with live video feed from a USB webcam. The result was similar at 3~3.3 fps. Note in the command below, the
-c 1means using the camera (V4L2) device at/dev/video1.$ ./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights \ -c 1
Overall, YOLOv3 did seem better than YOLOv2. When running YOLOv2, I often saw the bounding boxes jittering around objects constantly. While with YOLOv3, the bounding boxes looked more stable and accurate. The processing speed of YOLOv3 (3~3.3 fps on TX2) was not up for practical use though. I wondered whether it was due to its implementaion in darknet. I might try out some caffe implementation of YOLOv3 when I have time.