Making Faster R-CNN Faster!
In my previous post “Faster R-CNN on Jetson TX2”, I wrote about how to set up and run Faster RCNN on Jetson TX2, as well as to use it for real-time object detection with a live camera video feed. While Faster RCNN exhibited good object detection accuracy, it didn’t run fast enough on Jetson TX2. I got only ~1 fps (0.91~0.95 second per image) when running the pre-trained (VGG16 based) pascal_voc model.
To speed up Faster RCNN on a Jetson TX2, a recommended approach by NVIDIA is using TensorRT. In fact, NVIDIA already provided a sample code illustrating how to implement a Faster RCNN model with TensorRT. But anyway, I tried a different route and the result was OK. I replaced the slower VGG16 feature extrator with GoogLeNet layers in Faster RCNN, and was indeed able to boost its inference speed by a significant margin.
About how Faster RCNN works
In addition to the original paper, I’d also recommend reading this presentation file for understanding how Faster RCNN works.
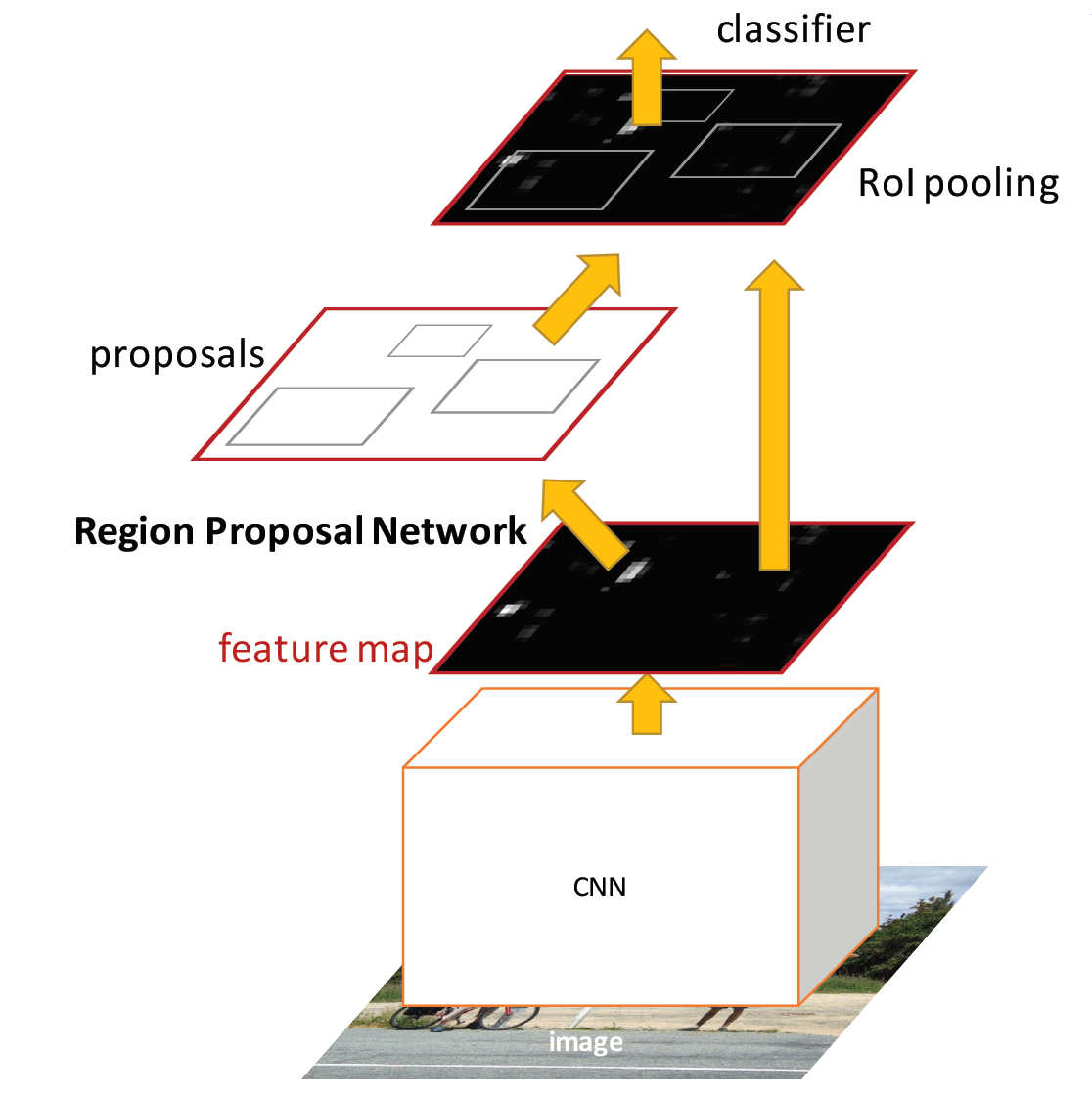
In a nutshell, the Faster RCNN network consists of 3 parts:
- ‘CNN’ feature extractor, which is used to turn the input image into a condensed feature map
- Region proposal network, which is used to generate Region Of Interests (ROIs)
- ‘Classifier’ network, which classifies (ROI-pooled) ROIs as either objects or backgrounds and generates the detection ouputs, i.e. bounding boxes and class probabilities/scores
About swapping CNN feature extraction layers of Faster RCNN
In the original Faster RCNN implementation, VGG16 (and ZF Net) is used as the CNN feature extractor. As I’ve checked previously, GoogLeNet, with similar cllaissification accuracy as VGG16, runs much faster on Jetson TX2. So I wanted to replace VGG16 layers with GoogLeNet in Faster RCNN, to improve its speed.
The way I implemented this is straightforward. I took bvlc_googlenet and split the neural network into 2 parts. I used all layers before (inclusive) inception_4e/output as the ‘CNN feature extractor’, and I used the rest (mainly inception_5x) layers as the ‘Classifier’ network. The resulting test.prototxt could be found here.
Running the modified Faster RCNN on Jetson TX2
-
Follow my “Faster R-CNN on Jetson TX2” post and make sure py-faster-rcnn runs OK on the target Jetson TX2.
-
Assuming
py-faster-rcnnhas been installed at/home/nvidia/project/py-faster-rcnn, do the following.$ cd /home/nvidia/project/py-faster-rcnn $ cd tools $ wget https://raw.githubusercontent.com/jkjung-avt/py-faster-rcnn/master/tools/demo_camera.py $ cd .. $ mkdir -p models/pascal_voc/GoogLeNet/faster_rcnn_end2end/ $ cd models/pascal_voc/GoogLeNet/faster_rcnn_end2end/ # wget https://raw.githubusercontent.com/jkjung-avt/py-faster-rcnn/master/models/pascal_voc/GoogLeNet/faster_rcnn_end2end/test.prototxtIn addition, download this voc2007_googlenet_iter_70000.caffemodel file and put it into the
models/pascal_voc/GoogLeNet/faster_rcnn_end2end/directory as well. -
Run the GoogLeNet Faster RCNN model with the demo script. Note the script uses the Jetson onboard camera by default. Specify the
--usbor--rtspcommand line options if a USB webcam or an IP CAM is used instead.$ cd /home/nvidia/project/py-faster-rcnn $ python2 tools/demo_camera.py \ --prototxt models/pascal_voc/GoogLeNet/faster_rcnn_end2end/test.prototxt \ --model models/pascal_voc/GoogLeNet/faster_rcnn_end2end/voc2007_googlenet_iter_70000.caffemodelWhen testing the above on my Jetson TX2, I was able to get ~2 fps (0.48s per image) throughput. That was roughly 2 times the speed of the original VGG16 based Faster RCNN!
Training the GoogLeNet Faster RCNN model
If you are interested in training your own GoogLeNet Faster RCNN model, do read on. But note that training of the Faster RCNN model should be done on a deep learning PC or server. The steps described below most likely won’t work on Jetson TX2.
-
Follow instructions on the py-faster-rcnn GitHub page and make sure the original VGG16 based Faster RCNN model could be successfully trained on your deep learning PC or server. More specifically, follow what’s stated under
Beyond the demo: installation for training and testing models.### Download Pascal VOC 2007 dataset $ mkdir -p ~/data $ cd ~/data $ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtrainval_06-Nov-2007.tar $ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtest_06-Nov-2007.tar $ wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCdevkit_08-Jun-2007.tar $ tar xvf VOCtrainval_06-Nov-2007.tar $ tar xvf VOCtest_06-Nov-2007.tar $ tar xvf VOCdevkit_08-Jun-2007.tar $ cd ~/project/py-faster-rcnn/data $ ln -s ~/data/VOCDevkit VOCdevkit2007 ### Download pre-trained ImageNet models $ cd .. $ ./data/scripts/fetch_imagenet_models.sh ### Do training and testing, using GPU 0 $ ./experiments/scripts/faster_rcnn_end2end.sh 0 VGG16 pascal_vocNote that this training could take a long time. And the final caffemodel file could be found at
~/project/py-faster-rcnn/output/faster_rcnn_end2end/voc_2007_trainval/. -
Download additional files needed for training your own GoogLeNet Faster RCNN.
Put these 2 files under
~/project/py-faster-rcnn/models/pascal_voc/GoogLeNet/faster_rcnn_end2end/:Put this file under
~/project/py-faster-rcnn/data/imagenet_models/: -
Train the GoogLeNet Faster RCNN with Pascal VOC 2007 dataset.
$ cd ~/project/py-faster-rcnn/ $ python2 ./tools/train_net.py --gpu 0 \ --solver ./models/pascal_voc/GoogLeNet/faster_rcnn_end2end/solver.prototxt \ --weights ./data/imagenet_models/bvlc_googlenet.caffemodel \ --imdb voc_2007_trainval \ --iters 70000 \ --cfg experiments/cfgs/faster_rcnn_end2end.yml 2>&1 | \ tee -a ./experiments/logs/faster_rcnn_googlenet.log -
After the training is done, verify its accuracy (mAP).
$ cd ~/project/py-faster-rcnn/ $ python2 ./tools/test_net.py --gpu 0 \ --def ./models/pascal_voc/GoogLeNet/faster_rcnn_end2end/test.prototxt \ --net ./output/faster_rcnn_end2end/voc_2007_trainval/voc2007_googlenet_iter_70000.caffemodel \ --imdb voc_2007_test \ --cfg experiments/cfgs/faster_rcnn_end2end.yml 2>&1 | \ tee -a ./experiments/logs/faster_rcnn_googlenet.logI tried to train this GoogLeNet Faster RCNN model quite a few times. The best mAP I got was around 0.69. It was very close to that of the original VGG16 Faster RCNN, which was also around 0.69.
Some additional notes about training the model: (based on my own experiments)
- I had to use a higher initial learning rate (0.005 instead of 0.001) and a lower weight_decay (0.0001 instead of 0.0005) in the solver to get better result.
- I got better mAP if I just used
SGDsolver with momentum (better thanAdam). - I got better mAP if I removed the Dropout (
pool5/drop_7x7_s1) layer in bvlc_googlenet.