Training a Fish Detector with NVIDIA DetectNet (Part 2/2)
As described in my previous post, Training a Fish Detector with NVIDIA DetectNet (Part 1/2), I’ve prepared Kaggle Fisheries image data with labels ready for DetectNet training. It’s time to load the data to my DIGITS server and do the training.
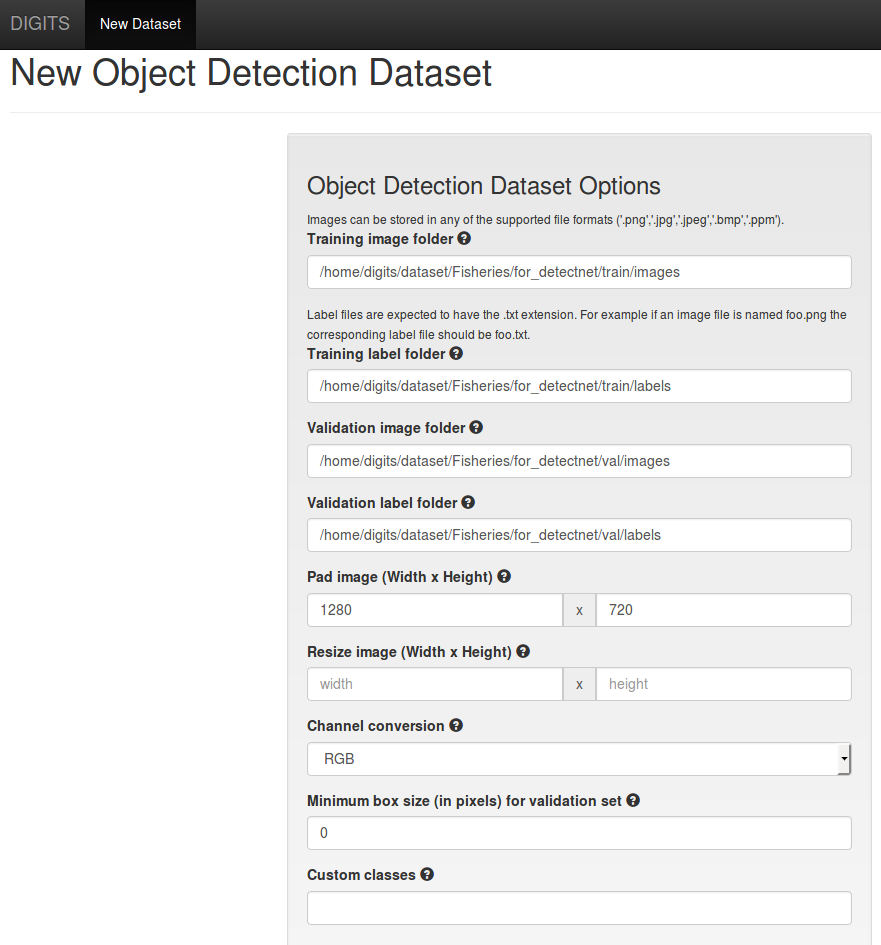
Training a DetectNet model with DIGITS is mostly straightforward, except that I had to modify image width and height correctly (1280x720) in the prototxt file (more on this later). I basically followed the Object Detection example (with KITTI dataset) in the NVIDIA/DIGITS GitHub repository.
I first loaded the Object Detection dataset into DIGITS.
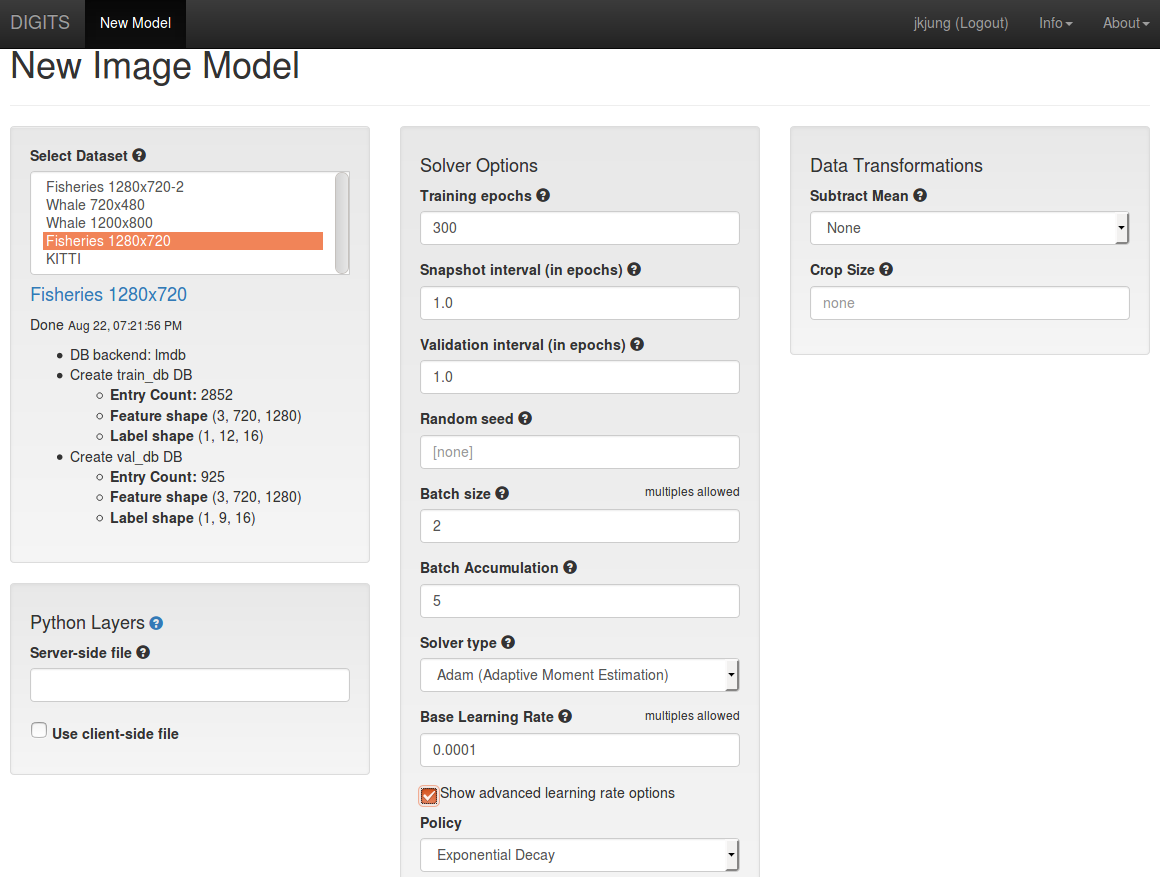
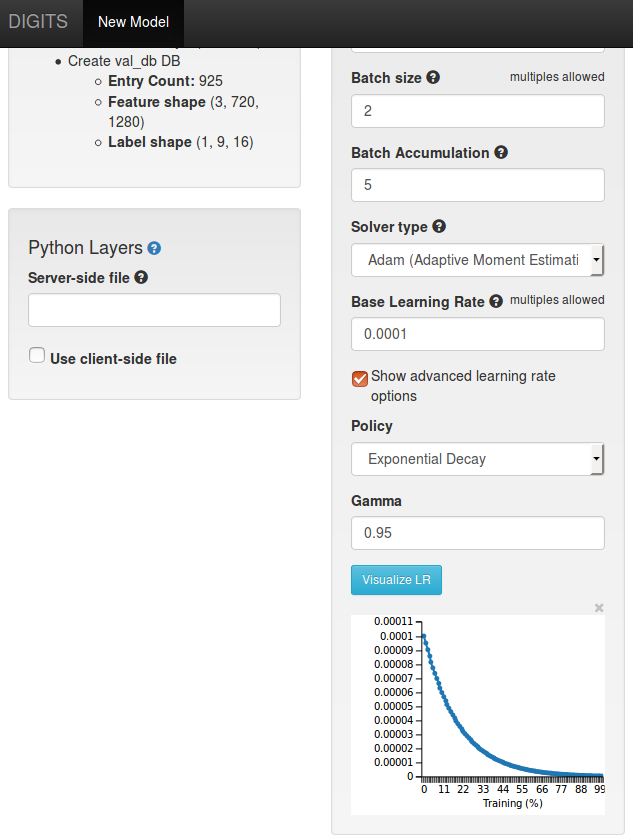
Next I created an Object Detection model to be trained with the dataset. Following the DIGITS Object Detection KITTI example, I set Subtract Mean to None, set Solver type to Adam, set Base Learning Rate to 0.0001 with (advanced) Exponential Decay Policy and 0.95 Gamma value, set Batch size to 2 and set Batch Accumulation to 5. Note that training the DetectNet on a GTX-1080 with 8GB memory, I was only able to fit at most 2 1080x720 input images as a batch to the GPU.
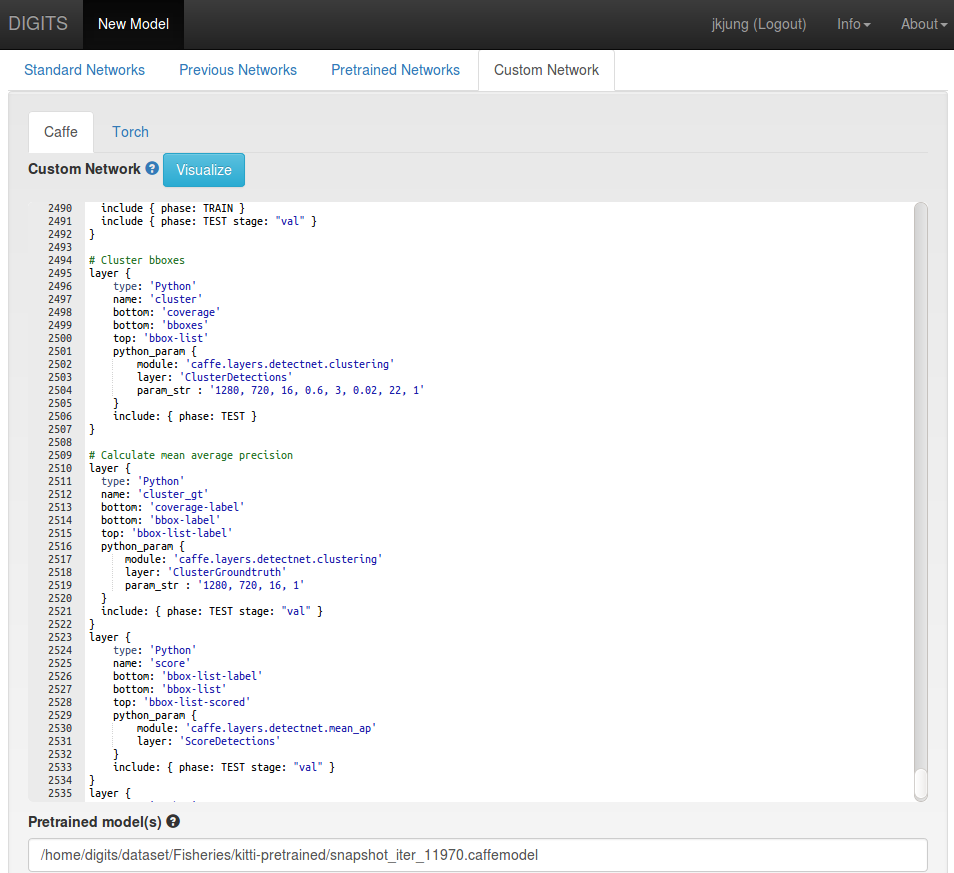
I then copied and pasted the example detectnet_network.prototxt as my Custom Network. And I did 2 important modifications here.
- I modified all image sizes from 1248x352 (or 1248x384) to 1280x720 in the prototxt. There are 6 occurences in total. Refer to the screenshot below for 2 of such occurences.
- I used a caffemodel (DNN weights) which had been pre-trained with KITTI dataset. With this transfer learning trick, I think the network should be able to learn faster.
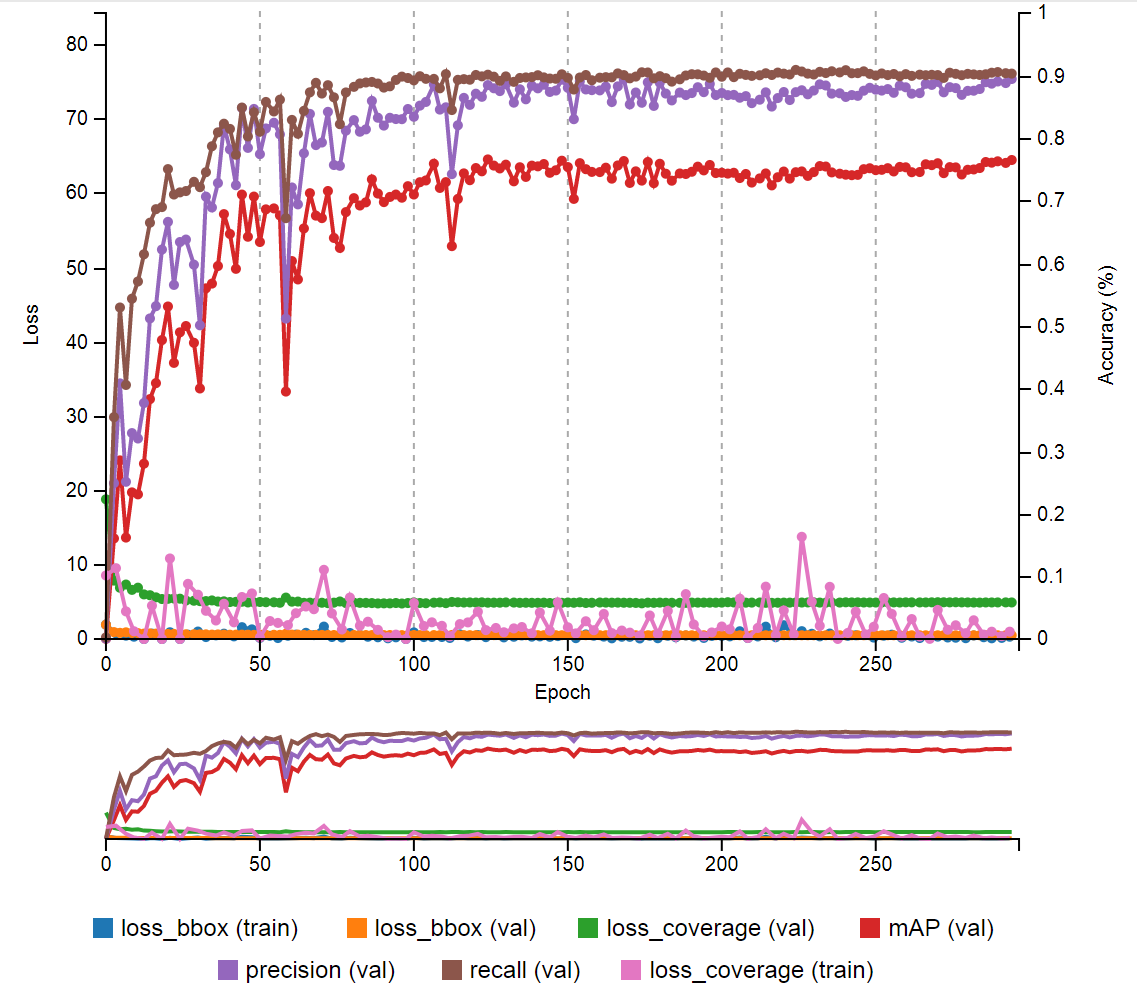
I trained the DetectNet model for 300 epochs in the first round. As a result I got a model with validation precision 75.3%, recall 76.0% and mAP 64.4. (By the way, training this model for 300 epochs on my GTX-1080 desktop PC took roughly 21 hours.)
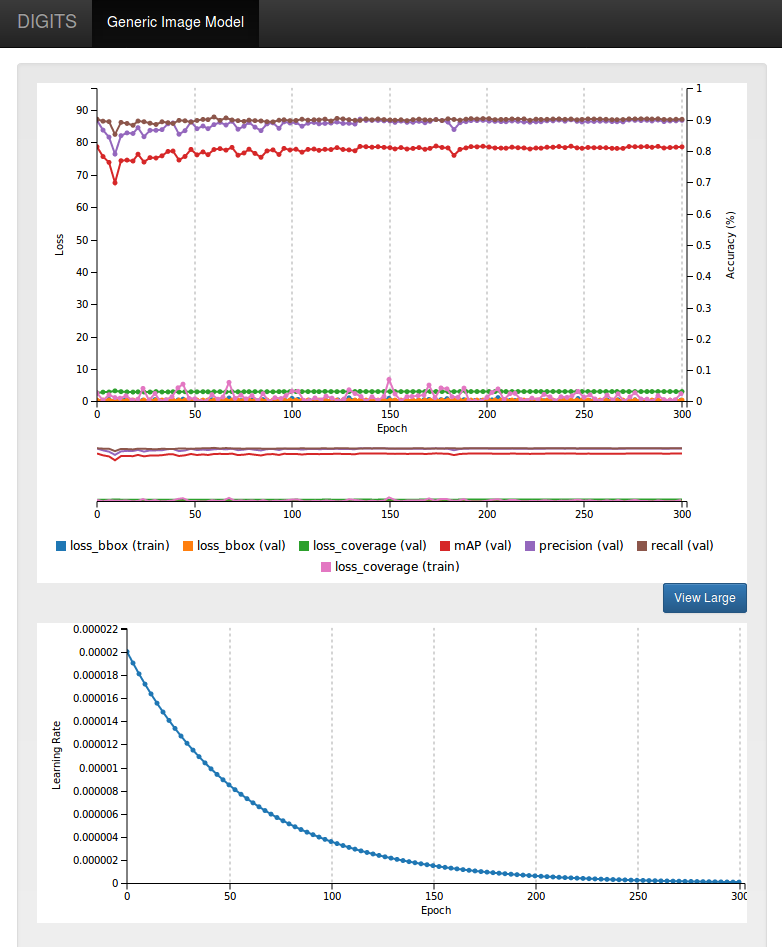
I took the result of the first round, fine-tuned a few parameters, lowering the learning rate a little bit, and trained the model again for 300 epochs. The result improved a little bit. In the end I had a DetectNet model with validation precision 86.77%, recall 87.12% and mAP 78.6.
Finally I tested my trained DetectNet model with the Test Many function in DIGITS. I could see that the model indeed had about 80% accuracy in detecting fishes on newly unseen test images (from test_stg1.zip).
Here is an example for which the model made a correct prediction.

And here is an example for which the model had clearly missed a fish.

Finally, I tried to deploy the fish detector onto Jetson TX2. I downloaded the final (epoch #300) network snapshot from DIGITS, and copied the files onto Jetson TX2. I had to manually remove the last Python layer in the deploy.protxt. I also modified detectnet-camera/detectnet-camera.cpp to use my Logitech C920 USB camera (/dev/video1) as video input. Then I ran the jetson-inference demo code by:
$ cd ~/project/jetson-inference/build/aarch64/bin
$ ./detectnet-camera \
-model /home/nvidia/project/jetson-inference/data/networks/DetectNet-Fisheries/snapshot_iter_88200.caffemodel \
-prototxt /home/nvidia/project/jetson-inference/data/networks/DetectNet-Fisheries/deploy.protxt \
-input_blob data \
-output_cvg coverage \
-output_bbox bboxes
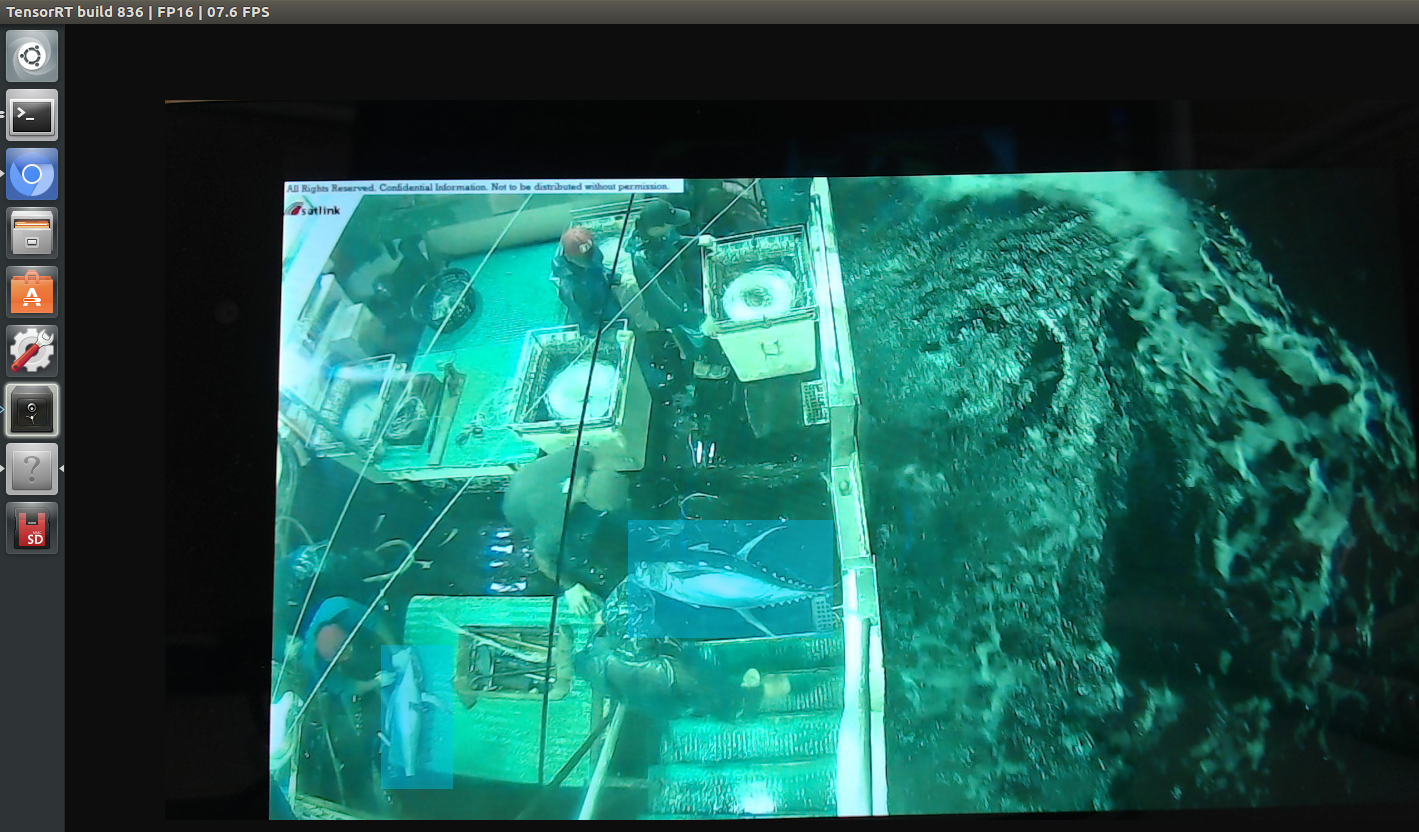
So there I had it: a real-time fish detector on Jetson TX2, which is capable of processing 1280x720 images at 7.6 frames per second…